2号機の推進力を向上させる為に、羽ばたきモーションの効率化を考えています。
推力を向上させる為には前回4つほど案を出しましたが、
2、羽ばたきの振幅の増加
3、羽ばたきモーションの見直し
以上の2つを始めに改善しておく必要があります。
(翼幅や、軽量化は基礎設計が完成してからでも変更可能なので。)
まず、羽ばたきモーションの見直しから始めました。
一号機の羽ばたきシステムは、SmartBirdと同じリンク機構を採用し、鳥の様な羽ばたきモーションを作り出しています。
ただ、この構造は一般的な羽ばたき機とは違い、翼を持ちあげる時にはほとんど推力を作る事が出来ません。
しかも、このリンク構造には大きな欠点があり、翼の翼端を”延しきる前”に打ち下ろしのモーションに入ってしまいます。
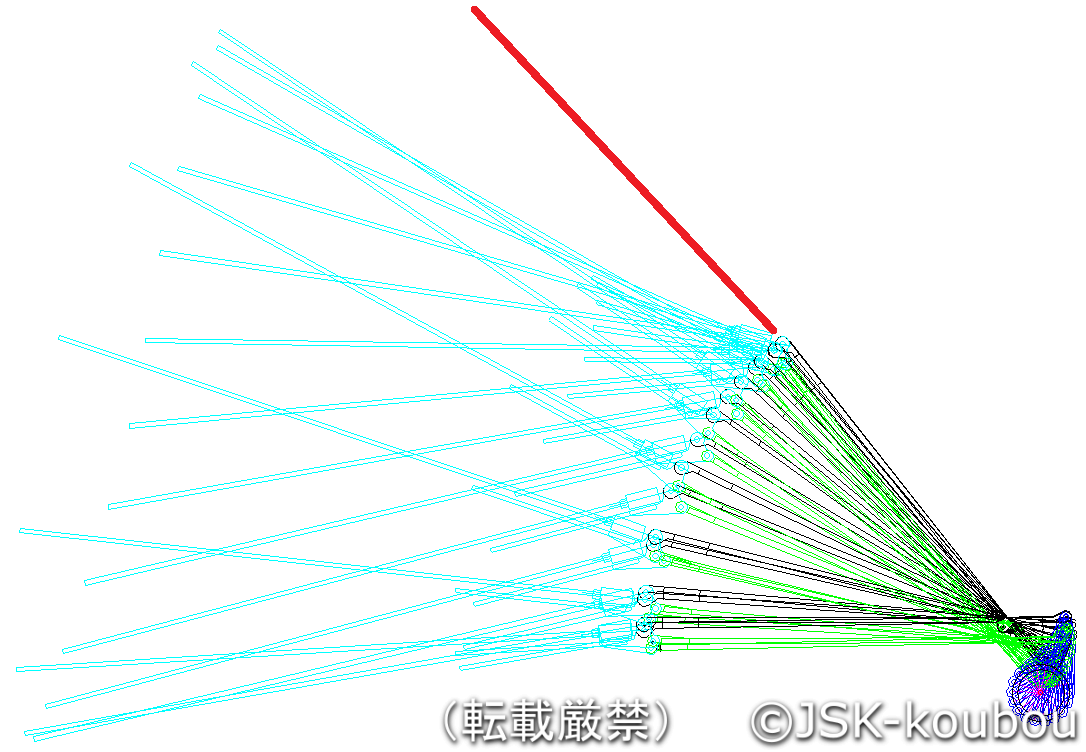
下の画像は、一号機の羽ばたきモーションを連続写真の様に重ねた物です。
赤の線に注目してください。
本来、赤線まで翼端が上がってから打ち下ろしに入った方が推力が上がりますし、効率的です。
ところが、実際は翼端が上がりきる前に打ち下ろしのモーションに入ってしまうので無駄な動きがある訳です。

この不具合を解消する一番手っ取り早い方法は、翼端の取り付け角を最初から赤線と同じ角度になるよう変えれば良いはずです。
しかし、そうすると翼を下すにつれ、翼端が上方向に反り返ってしまい、うまく空気を後ろへ押し出せません。
smartbirdの羽ばたきが反り返ってしまうのはこのためです。
すでに、一号機ではこの不具合が最小になるよう色々と考慮しているのですぐに改善案が出せる問題ではありませんでした。
いったん羽ばたきモーションの見直しは保留し、羽ばたき振幅の増加に入ります。
こちらは、支点となる部分を力点に近づけるだけで振幅が増加するので単純。
・・・のはずでした。
下が支点を変更したモーションになります。
羽ばたき振幅を単純に増加すると、最初に問題となった翼端の不具合も大きくなってしまうのです。

色々、リンクの支点位置を変えたりしましたがどちらかを優先すると片方が犠牲となり、結局良い解決方法が思いつきません。
結局SmartBirdのリンク機構で改善する事は難しく、とても納得のいく物が作れそうになかったので別のリンク機構を模索する事にしました。
ネットで使えそうなリンクが無いか検索して見ましたが、当然同じ事をやっている人が他にいないので答えを見つける事は出来ませんでした。
ただ、大きなヒントを見つける事は出来ました。
ある有名なリンク機構を取り入れる事で上記の2つの問題を一気に解決できる事に気が付きました。
下が改善したリンク機構の連続図。
このリンク機構は二号機開発の大きなキーポイントになるのでまだ公開は出来ませんが、一号機と比べ、振幅の増加とモーションの不具合が改善出来ている事が分かると思います。
現在これを用いて設計中ですが、一応部品の干渉もなく組み込めています。
ただ、モーターの負荷が大きくなるのでギヤ比を落とす必要が出てくるかもしれません。


コメント